Shutter Description Package¶
3D models for visualizing and simulating the Shutter robot.
Quick Start¶
Run the following launch file to publish the robot description and joint states, as well as visualize the robot in RVIZ:
$ roslaunch shutter_description shutter_rviz.launch [robot_version:=2.0]
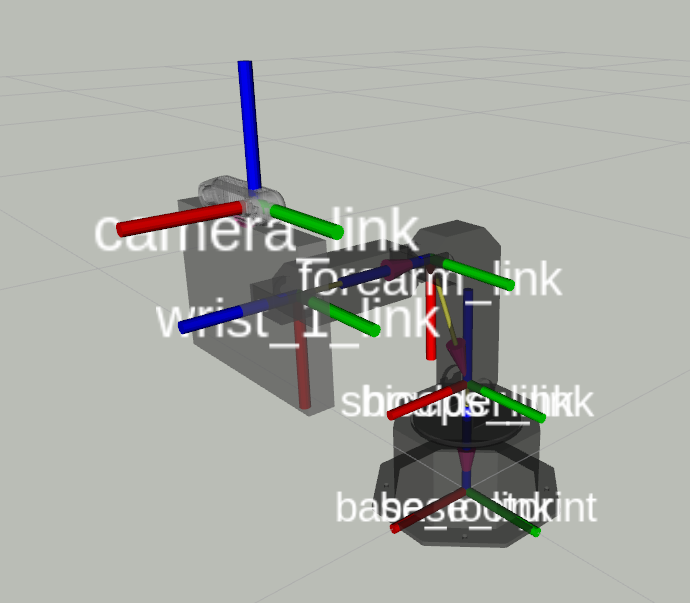
By default, the above launch file loads the model version 2.0, as illustrated below:
Shutter Models¶
This package contains descriptions for v. 0.1, 0.2, 2.0, and 3.0 of the robot. The first version of the robot used a ZED camera instead of a RealSense camera, and had no screen face. A picture of it is shown below:

Versions 2.0 and greater do not use arbotix, but a ROS Control hardware interface that connects through the U2D2 USB communication converter with the Dynamixel servos in the arm.
Version 3.0 of the robot also includes a mesh and simplified collision geometry for the movable cart developed for the Shutter In-the-Wild project.
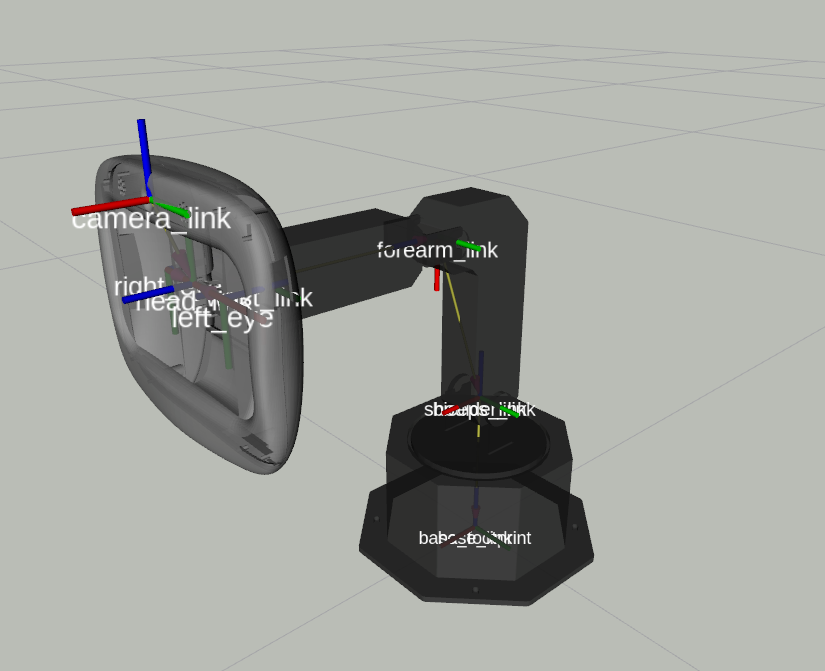
Version 4.0 of the robot replaces the original screen face assembly and RealSense camera with a 3D printed head enclosure with an embedded Logitech C920 webcam. A picture of the updated head is shown below:
Re-using Shutter¶
The URDF for Shutter can be easily added to multi-robot assemblies.
In particular, the files shutter.v.1.xacro and shutter.v.2.xacro in package://shutter_description/urdf can augment other robots or assemblies by specifying the parent transform.
WARNING: The versioning for the base Shutter assemblies differs from the user-invoked versions described above! The base Shutter assemblies can only be version 1 (original head, equivalent to user-version 2.0) or version 2 (new head, equivalent to user-version 4.0).
The following snippet embeds Shutter (with the new head enclosure) into a larger assembly.
Shutter will be attached to the tabletop_link at a translational offset of 2 mm in the z-axis of the parent frame and no rotation.
<xacro:include filename="$(find shutter_description)/urdf/shutter.v.2.xacro"/>
<xacro:shutter parent="tabletop_link" xyz="0 0 0.002" rpy="0 0 0"/>
Acknowledgements: The arm model is based on the widowx_arm_description package by Robotnik. The Real Sense D435 camera model is based on the official realsense2_camera package by Intel. For Shutter v0.1, the ZED camera model is based on the racecar_description package by MIT.