Shutter Face Package¶
Code to render the robot’s face on its screen.
Requirements¶
Shutter’s face requires the PySide2 library.
You can easily install it by running pip within the shutter_face package:
$ roscd shutter_face_ros
$ pip3 install -r requirements.txt --user
If you don’t have pip installed, install it with sudo apt-get install python3-pip.
Quick Start¶
Run the following launch file to start the face:
$ roslaunch shutter_face_ros simple_face.launch
Then, send requests for changing the gaze direction of the robot through the /gaze/coordinate_points topic. For example:
$ rostopic pub /gaze/coordinate_points geometry_msgs/PointStamped "header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: 'head_link'
point:
x: 0.0
y: 0.0
z: 1.0"
Other facial expressions¶
Other facial expressions are available and can be accessed by publishing to the topic /gaze/expression_index. Possible expressions to request include:
‘neutral’ (default), ‘angry’, ‘bored’, ‘determined’, ‘happy’, ‘happy2’, ‘sad’, and ‘surprised’
The extra expression of blink just closes the eyes.
You can change the facial expressions with a controller through the shutter_teleop file:
$ roslaunch shutter_teleop face_controller.launch
Simulation¶
Shutter’s face can be rendered to a separate window, instead of Shutter’s face screen:
$ roslaunch shutter_face_ros simple_face.launch move_to_shutter_screen:=false
It is also possible to render Shutter’s face on the simulated robot in Unity:
$ roslaunch shutter_teleop face_controller.launch simulation:=true
Implementation Details for Face Simulation¶
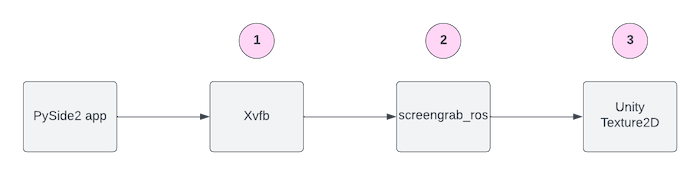
Shutter’s face is implemented as a PySide2 application. When rendered on a physical screen, the application is simply drawn on that screen. To be rendered on a virtual screen in Unity, the application follows a different pipeline:
The PySide2 application is rendered in a virtual X display with Xvfb.
The Xvfb display is converted into a ROS image with screengrab_ros.
The ROS image is applied to a Unity object as a texture.
The key parameter binding this pipeline is the DISPLAY environment variable.
The PySide2 application must be placed on the display instantiated by Xvfb, and the screengrab_ros package must point to the same Xvfb display.
This pipeline is illustrated in the block diagram below: